Sunday, August 19, 2012
Week #13
I have completed correlator — Detection feature points and searching corresponding points on different images.
This week I finished documentation for my code, performed refactoring and cleaning up.
I implemeted in GDALCorrelator file 2 main external methods for searching and matching feature points. Methods provide simple and seamless usage of my internal classes.
My mentor is going to implement GCP producing based on my realization, adapt and migrate correlator to GDAL.
I'll devote my remaining time to refining documentation and helping in porting correlator.
I participate in GSoC program for the first time, and it's an unforgettable and priceless experience for me :)
Saturday, August 11, 2012
Week #12
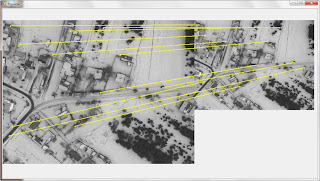
This week I've sucessfully ported code for searching corresponding points to C/C++, so it's possible to use algorithm in GDAL now.
https://github.com/migal-drew/GDAL-correlator
Method uses RGB values to prepare grayscale image as 2-dimensional array of pixels brightness, than finds feature points and matches their. User should provide threshold values and octave numbers. Octave affects on the size of detected points. So, for small images you should use small octave numbers, and vice versa. For example, octaves 2-3 are good for 640x480 and 1024x768 images.
I recommend to use the small number of octave ranges (one-two), for instance numbers 2-2, 4-4, 2-3, but not 1-6 or 2-8, besause it slows down computation speed in several times. Also I don't recommend use high resolution photos. In future I'm going to fix this computation issues. In this project I concentrated on reliable results more than speed.
Another important thing that algorithm is scale and rotation sensitive. The images should have similar size and angle (difference up to 10-15 degrees).
The results are better than shown in my previous post, because I implemented simple false matching detection, and algorithm tends to find more robust matches.
https://github.com/migal-drew/GDAL-correlator
Method uses RGB values to prepare grayscale image as 2-dimensional array of pixels brightness, than finds feature points and matches their. User should provide threshold values and octave numbers. Octave affects on the size of detected points. So, for small images you should use small octave numbers, and vice versa. For example, octaves 2-3 are good for 640x480 and 1024x768 images.
I recommend to use the small number of octave ranges (one-two), for instance numbers 2-2, 4-4, 2-3, but not 1-6 or 2-8, besause it slows down computation speed in several times. Also I don't recommend use high resolution photos. In future I'm going to fix this computation issues. In this project I concentrated on reliable results more than speed.
Another important thing that algorithm is scale and rotation sensitive. The images should have similar size and angle (difference up to 10-15 degrees).
The results are better than shown in my previous post, because I implemented simple false matching detection, and algorithm tends to find more robust matches.
I'm planning to spend remaining time cleaning up code (improving readability) and working on documentation, and I need to discuss with my mentor about current situation and specify completed goals.
*UPDATED
Actually algorithm is scale invariant. I perfomed a test using images with different resolutions. Octave range - 1-3 for both images. Left picture - 512x512, right - 300x300.

Here you can see how many robust matches algorithm is able to find. It's near perfect, wrong detections are possible very rarely (I was planning to implement good technique for false detetions pruning - RANSAC, but project has lagged because of his complexity, so I decided to make another simple, but still admissible method. I'm very excited of that I implemented, and it works as I've planned in the begin.


*UPDATED
Actually algorithm is scale invariant. I perfomed a test using images with different resolutions. Octave range - 1-3 for both images. Left picture - 512x512, right - 300x300.

Right - 640x480, left - 400x300



Saturday, August 4, 2012
Week #11
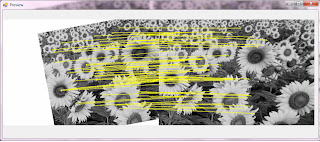
This week I implemented descriptors and method for matching points (based on euclidean distance and bruteforce comparison). Matching requires value of threshold. If threshold is low - number of coressponding points is small, but results are robust, and conversely.
https://github.com/migal-drew/SimpleSURF_csharp
Next week I'm planning to port my code in GDAL, test algorithm and work on documentation.
Examples:


Here is result in case if threshold is too high (false detections intersect other "true" matches)


Test with "sunflower field" image

And test with "standard" image in computer vision ("lenna image")


https://github.com/migal-drew/SimpleSURF_csharp
Next week I'm planning to port my code in GDAL, test algorithm and work on documentation.
Examples:




Test with "sunflower field" image


And test with "standard" image in computer vision ("lenna image")


Subscribe to:
Posts (Atom)